교류전류
작성일 : 2025년 04월 05일 (Saturday)
Table of contents
교류
교류란 무엇일까? 전류의 +/-가 계속해서 반복적으로 변경되는 전류를 의미한다. 일반적으로 사인파를 말한다.
실효값 RMS (Root Mean Square)
회로를 설계할 때에는 회로가 과도하게 과열되지 않도록 설계해야 하고, 회로의 목표 동작온도 범위내에서는 온도 상승/하락에 의해서 회로의 성능에 영향을 받지 않도록 하는 소자를 선택해야 한다. 보통 온도 상승은 저항에 흐르는 열에 의한 것이고, 이 온도 상승 속도는 전류의 제곱에 비례하기 때문에 회로를 보호하기 위해서는 전류량을 1차적으로 제한한다. 열 에너지 계산식 등이 직류값을 기준으로 작성되었기 때문에 계산을 용이하게 하기 위해서 실효값이 사용된다고 생각하면 된다. RMS값은 회로에 동일한 가열효과를 줄 수 있는 등가(같은 양의 일을 하는) 직류값을 의마한다. RMS값은 정현파에서는 교류전류의 피크치를 $\sqrt{2}$로 나눈 값을 의미한다. 일반적인 RMS 공식은 다음과 같다.
$$ V_{rms} = \sqrt{\frac{1}{T} \int_{0}^{T} v^2(t) \,dt } $$
RMS 공식
교류회로의 전력
직류회로에서는 전력(P)을 구할 때에는 단순히 전압과 전류를 곱해서 계산했었다. 하지만, 교류회로에서는 이 계산을 RMS 전압과 RMS 전류를 곱함으로써 구할 수 있다. 교류회로는 계산시점, 유도효과 등에 의해서 전력이 조금씩 다를 수 있지만 그 값은 항상 RMS 값을 이용한 전력보다 작은 값이라는 것만 알면 된다.
전류와 전압의 위상이 동일하고, 유도효과가 무시할만큼 작다고 가정하고 교류회로의 전력을 계산해보자. 즉, 순수 저항만 존재하는 회로에 교류를 흘려놓은 상황을 가정해보자. 전류, 전압의 피크치가 각각 $I_{Max}$, $V_{Max}$라면 전력은 $\frac{I_{Max}V_{Max}}{2}$가 된다.
유효전력, 무효전력, 피상전력, 그리고 역률
교류에서는 전력을 유효전력 P(Active Power), 무효전력 Q(Reactive Power), 피상전력 $V_a$(Apparent Power) 3가지로 구분한다. 피상전력이란 전원에서 공급하는 전력으로 단위는 VA이다. 유효전력은 교류회로의 임피던스에서 저항에 의해서 실제 소비되는 전력을 말한다. 단위는 W이다. 무효전력은 실제로 사용되지는 않았지만 리액턴스에 의해서 소모되는 전력을 말한다. 단위는 역시 Var이다.
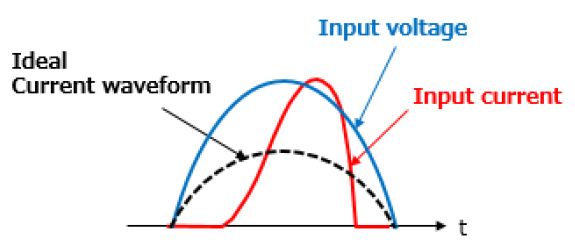
여기서 중요한 개념인 역률(PF; power factor)이 있는데, 역률은 부하단에서 측정된다. 역률은 전체 피상전력 대비 유효전력의 비율로 0~1의 값으로 표현된다. 역률이 낮으면 부하가 동작할 때, 부하단에 전달되는 유효전력이 송전전력 대비 낮다는 뜻이기 때문에 역률은 높은 것이 유리하다. 송전시에는 역률이 1이었더라도 송전시 전선 등에 의해 파형이 왜곡되거나 위상지연이 발생하므로 부하단에서 직접 이를 보상해서 사용해야 한다.
역률 보상기 (PFC : Power Factor Corrector)
전자기기에서 전자기기의 원래 역할을 수행하는 부분은 위상차가 없는 AC 전원이 연결된 것으로 가정하여 개발되기 때문에 전자기기의 입력단에서 역률을 보상하게 된다. 즉, PFC는 그리드에 연결된 전자기기에서 필요한 회로의 입력단에서 사용된다.
역률 보상기는 동작 방식에 따라 수동 역률 보상기와 능동 역률 보상기가 존재한다.
수동 역률 보상기
수동 역률 보상기는 별도의 능동제어 없이, 단순히 전파정류 회로와 RLC 회로를 사용해서 역률을 보상하는 회로를 말한다. 커패시턴스와 인덕턴스 값이 고정되어 있기 때문에 어느 정도까지는 역률 보상을 안정적으로 할 수 있지만, 높은 역률을 보장할 수는 없다.
능동 역률 보상기
능동 역률 보상기는 능동적으로 파형을 제어할 수 있는 스위치, 그리고 스위치를 제어하기 위한 게이트 드라이버와 게이트 드라이버에 신호를 전달하는 마이컴 혹은 DSP 가 필요하다. 능동적으로 제어하기 때문에 거의 100%에 가까운 높은 역률을 달성할 수 있다. 능동 역률 보상기는 전력전자에서 많이 사용된다. 대표적으로 OBC (On Board Charge)는 직접 전력계통에 연결해서 배터리를 충전시켜주는 장치인데 PFC가 필수로 적용된다.
원리
전형적인 PFC 회로를 살펴보자. 회로의 형태를 보면 일단 전파 정류 회로에 부스트 컨버터를 가져다 붙인 형식이다. 따라서, 입력받은 전압은 PFC를 거치면 전압이 높아진다.
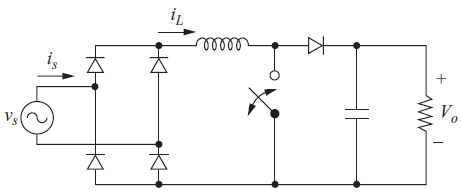
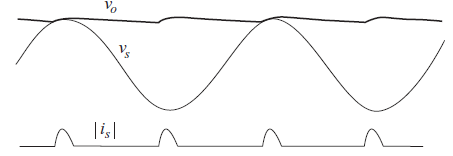
일단, PFC 회로는 입력받은 교류 사인파를 전파정류하여 다음과 같은 형태로 가공한다.

인덕터와 스위치의 역할이 무엇일지 확인하기 위해서, 인덕터와 스위치가 없는 형태를 생각해보자.

인덕터와 스위치가 없다면 초기에는 다이오드를 통해서 전류가 흐르지만, 커패시터가 어느 정도까지는 충전되고 난 다음부터는 R에 의해 방전되는 시간동안만 다이오드를 통해 전류가 흐르게 될 것이다. 그림오로 보면 다음과 같이 위상차가 조금 더 틀어지는 정도가 아니라 아예 다른 파형이 출력되는 것을 볼 수 있다.
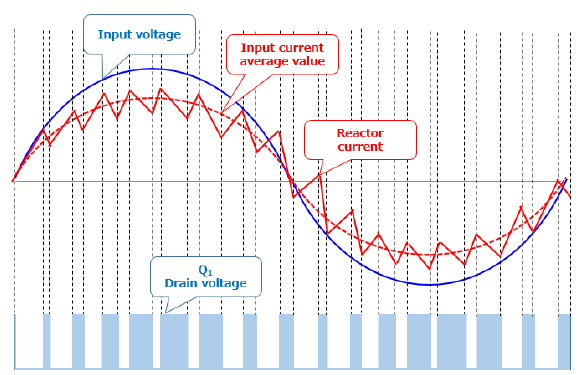
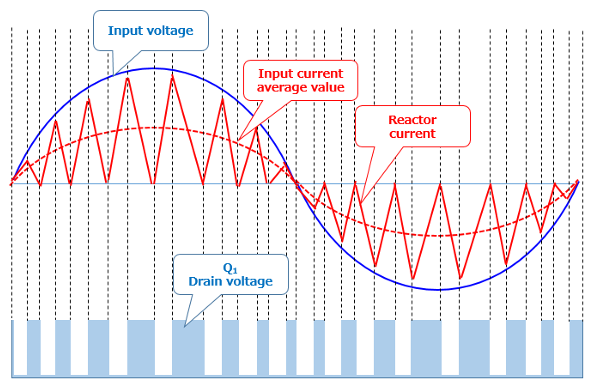
그럼 이제 다시 인덕터와 스위치가 있던 원래의 싱글 PFC 회로 구조를 살펴보자. 스위치의 게이트 PWM 신호의 듀티를 제어함으로써, 전압과 전류파형의 위상을 조정할 수 있다. 스위치가 ON이 되면 인덕터가 충전되고, 스위치가 OFF 되면 인덕터가 방전된다. PWM 제어를 통해 인덕터를 CCM, BCM, DCM 모드로 제어한다. CCM, BCM, DCM 모드는 부스트 컨버터의 특징을 생각해서 결정해야 한다. 부스트 컨버터는 인덕터를 사용해서 전압을 높이는 방식인데, 원리는 인덕터를 충전해서 인덕터 + 입력전압을 출력단에 전달해서 높은 전압으로 출력단에 에너지를 전달하는 방식이다. CCM은 어느정도 인덕터 전압을 유지하는 방식이고, BCM은 인덕터 전압이 0이 될때까지 인덕터를 완전 방전시켜서 사용하는 방식이고, DCM은 인덕터 전압이 0인 구간이 늘어나는 것을 의미한다. CCM은 안정적인 전원 공급을 위해서 선택되고 인덕턴스가 어느 정도 커야하고, BCM은 그에 비해서 작은 전력에 사용되고 인덕턴스가 조금 더 작아도 되고 제어가 간단해진다는 장점이 있다. DCM은 BCM보다 더 작은 인덕턴스를 갖는 인덕터를 가지고 있어서 소형화에 유리하지만, 전류가 0으로 떨어지는 구간이 있어서 인덕터 권선 저항 등에 의한 인러쉬 전류 등에 취약해져서 열에 취약해질 수 있다는 문제점이 있다.
CCM, DCM, BCM
CCM : Continuous Conduction Mode
DCM : Discontinuous Conduction Mode
BCM : Boundary Conduction Mode
CrCM : Critical Conduction Mode
BCM과 CrCM은 같은 말이다.
CCM 모드로 제어한다는 것은 인덕터 전류를 항상 0보다 크도록 제어하는 것을 의미한다. CCM 의 단점은 FET가 ON 되는 순간 인덕터에 흐르고 있는 전류에 의해 스위칭 손실 및 전도 손실이 커질 수 있다는 것이다. 손실이 크다는 것은 효율이 낮아진다는 의미도 있지만, 줄열에 의해서 온도가 상승하게 되므로 냉각 요구사항이 높아질 수 있다는 점이다. CCM을 굳이 써야한다면 다이오드가 역바이오스됐을 때 (스위치가 ON이 되며 저항을 통해서 역전압이 걸림) 다이오드의 역전류에 의해서도 FET 손실이 증가할 수 있기 때문에 SiC 쇼트키 다이오드를 사용하고, 냉각을 더 철저하게 할 필요가 있다.
BCM 모드로 제어한다는 것은 인덕터 전류가 0이 됐을 때 다시 스위치를 ON한다는 것을 의미한다. BCM 제어는 인덕터 전류가 0이 되면 다시 PWM ON을 시키기 때문에 ZVS 를 하므로 스위칭 로스가 적고, CCM 과 비교했을 때 FET 손실이 적다. 하지만, CCM에 비해 안정성이 떨어진다.
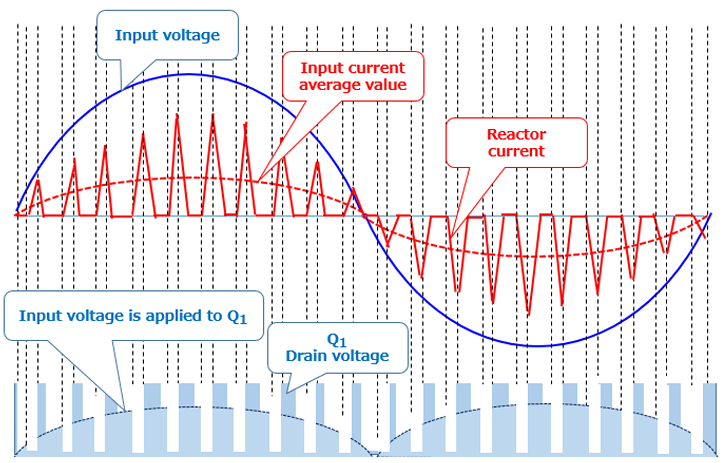
DCM 모드로 제어하면 인덕터 전류가 0인 구간이 많고, BCM 처럼 ZVS 가 가능해 스위칭 로스가 최소화 된다. 하지만, 위에서 언급했듯 인러쉬 전류때문에 열 관리가 어렵고, 효율이 떨어진다는 문제점이 존재한다. 전원 공급 장치보다는 저전력 전자제품에서 사용할 수 있는 정도이다.
| 주파수 | 열 발생 | 전원 안정성 | |
|---|---|---|---|
| CCM | 고정 | 높음 | 높음 |
| BCM | 가변 | 낮음 | 낮음 |
| CCM | 고정 | 높음 | 매우 낮음 |
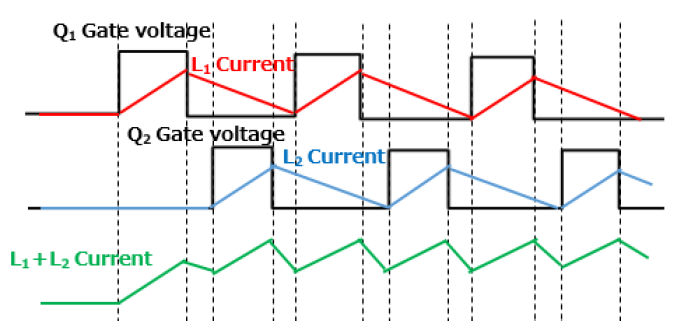
인터리브 PFC
인터리브 PFC는 싱글 PFC에서 부스트 컨버터에서 인덕터, 다이오드, 스위치 부분이 2개가 된 형태로 다음과 같다.
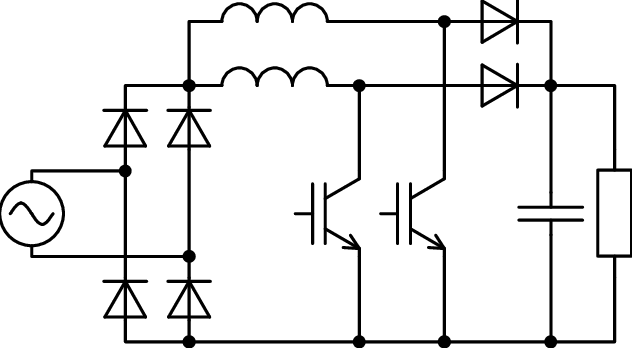
인터리브 PFC는 동일한 주파수를 사용해서 180도 위상을 갖는 게이트 신호를 Q1/Q2에 각각 인가해서 턴온 시간을 줄여서 FET의 온도 증가를 감소시키면서, 인덕터 전류의 리플의 크기도 감소시킬수 있다는 장점이 있어서 대전력이 필요한 전자제품에서 많이 사용된다.