전자전기회로 분석
작성일 : 2025년 06월 15일 (Sunday)
전기회로
입력 $e_{i}$가 있고, 저항과 인덕터가 직렬로 연결되어 있고, 출력단에 커패시터가 병렬로 연결되어 있는 형태를 생각해보자. 이 경우, $Z_{1} = R + Ls$, $Z_{2} = \frac{1}{sC}$ 라고 해보자.
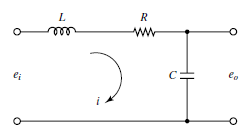
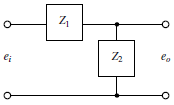
위에 대한 전달함수를 구해보면 다음과 같다.
$$ \frac{e_{o}}{e_{i}} = \frac{Z_{2}}{Z_{1} + Z_{2}} = \frac{\frac{1}{sC}}{R + Ls + \frac{1}{sC}} = \frac{1}{LCs^{2} + CRs + 1} $$
전달함수 도출
전자회로
전자회로는 OPAMP, 비교기 등 IC 칩을 사용하는 회로를 의미한다.
증폭회로
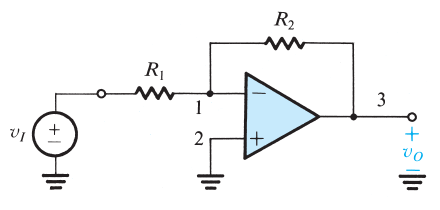
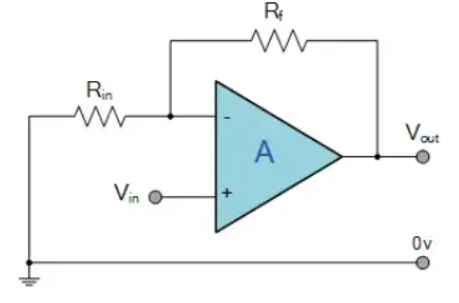
아래와 같이 증폭회로가 있는 경우를 생각해보자.
증폭회로를 식으로 표현하면, \(e_{0} = K(e_{2} - e_{1})\)와 같다. 조금 더 일반적인 방식으로 표현하면 \(v_{o} = K_{(+)}(v_{(+)} - v_{(-)}) = K_{(-)}(v_{(-)} - v_{(+)})\) 이다. 반전증폭기의 이득은 \(-\frac{Z_{2}}{Z_{1}}\), 비반전증폭기의 이득은 \(1 + \frac{Z_{1}}{Z_{2}}\)이다.
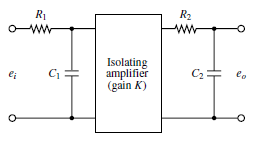
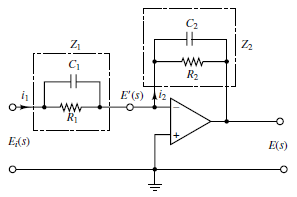
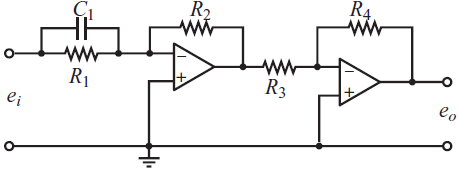
진상/지상 회로망이 존재하는 증폭회로
아래와 같이 진상/지상 회로망을 갖는 증폭회로를 고려해보자. 입력 - R//C - 출력단에 의해 파형은 진상 (전류가 전압보다 앞섬) 이 된다. 진상이 2개 있는 경우이다. 쉽게 파악하기 위해 OPAMP의 -입력단 사이의 임피던스를 $Z_{1}$, 음성피드백 라인의 임피던스를 $Z_{2}$라고 하면 아래 회로는 반전 피드백 구성이되어 반전증폭기의 관계식을 갖게 된다.
OPAMP를 이용한 아날로그 제어기
OPAMP를 사용해서 아날로그 제어를 수행할 수 있다. 반전 증폭기, 비반전 증폭기는 P 제어기라고 볼 수 있다. 아래의 PI, PD, PID 제어기를 살펴보자. 마찬가지 방법으로 계산하면 각각의 Kp, Ki, Kd 를 구할 수 있다. 음성 피드백 라인에 연결된 C는 적분기, 음성 피드백 라인과 입력단 사이에 있는 C는 미분기의 역할을 수행한다. PI 제어기와 PD 제어기를 PID 제어기로 바꾸기 위해서 미분요소나 적분요소를 추가한다고 해서 기존의 Ki, Kd 계수가 변하지 않는다는 점과 PI/PD 제어기의 Kp 계수는 동일하다는 점은 기억할만 하다.
PI 제어기
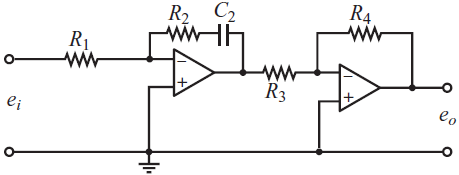
$$ K_{p} = (-\frac{R_{2}}{R_{1}})(-\frac{R_{4}}{R_{3}}) = \frac{R_{2}R_{4}}{R_{1}R_{3}} $$
$$ K_{i} = (-\frac{1}{R_{1}C_{2}})(-\frac{R_{4}}{R_{3}}) = \frac{R_{4}}{R_{1}R_{3}C_{2}} $$
PI 제어기 계수
PD 제어기
$$ K_{p} = (-\frac{R_{2}}{R_{1}})(-\frac{R_{4}}{R_{3}}) = \frac{R_{2}R_{4}}{R_{1}R_{3}} $$
$$ K_{d} = (-R_{2}C_{1})(-\frac{R_{4}}{R_{3}}) = \frac{R_{2}R_{4}C_{1}}{R_{3}} $$
PD 제어기 계수
PID 제어기
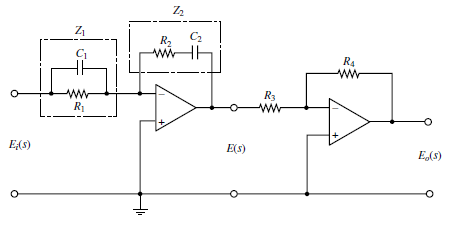
$$ K_{p} = \frac{R_{4}(R_{1}C_{1} + R_{2}C_{2})}{R_{1}R_{3}C_{2}} $$
$$ K_{i} = \frac{R_{4}}{R_{1}R_{3}C_{2}} $$
$$ K_{d} = \frac{R_{2}R_{4}C_{1}}{R_{3}} $$
PID 제어기 계수
▶ 포스트