저항과 임피던스
작성일 : 2023년 01월 07일 (Saturday)
Table of contents
저항과 임피던스
저항이란 무엇일까? 저항은 전류가 어느 매질을 통해 흐를 때, 방해가 되는 정도를 의미한다. 저항이 크다는 것은 그만큼 전류가 흐르기 어려운 것을 의미한다. 저항에 의한 전류 손실은 줄열로 인해 열로 발산된다. 임피던스는 다른말로 온저항 혹은 교류저항으로 불리고, 교류회로에서 사용하는 개념이다.
줄의 법칙 (Joule’s law)
영국의 물리학자 제임스 프레스콧 줄의 이름을 딴 법칙으로 1법칙 2법칙이 존재한다. 이 중 1법칙이 저항에 의한 발열을 정의한다. 줄의 제 1법칙에서는 단위시간당 에너지(줄열)은 도체에 흐르는 전류의 제곱에 비례한다고 되어 있다. 즉, $P(t) = I^2Rt$인 것이다.
리액턴스
리액턴스란 용어의 사전적 뜻은 반응을 보이는 정도를 의미한다. 전기적으로 표현하면 전원의 성질이 변했을 때 소자가 반응하는 정도를 표현하는 값을 정량화한 수치라고 이해하면 된다.
유도성 리액턱스는 인덕터에 의한 것이고, 용량성 리액턴스는 커패시터에 의한 것이다. 인덕터는 전기에너지를 자기장의 형태로 저장하는 장치이고, 커패시터는 전기에너지를 전기장의 형태로 저장한다. 커패시터의 리액턴스가 $\frac{1}{wC}$, 인덕터의 리액턴스가 $wL$이라는 점을 상기해보면 커패시터는 주파수가 작을 수록 리액턴스가 크고 인덕터는 그 반대라는 것을 알 수 있다.
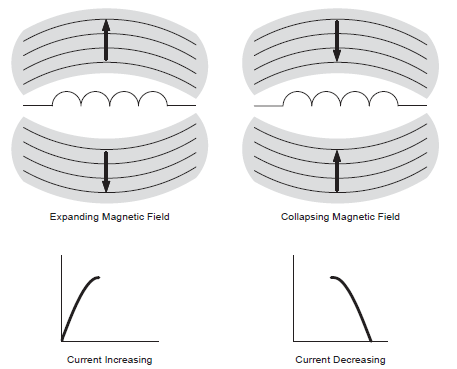
인덕터를 통해 전류의 변화량을 조절할 수 있고, 커패시터를 통해 전압의 변화량을 조절할 수 있고 전원이 사라졌을 때 일시적으로 전원 공급도 가능하다.
페이저 (위상자)
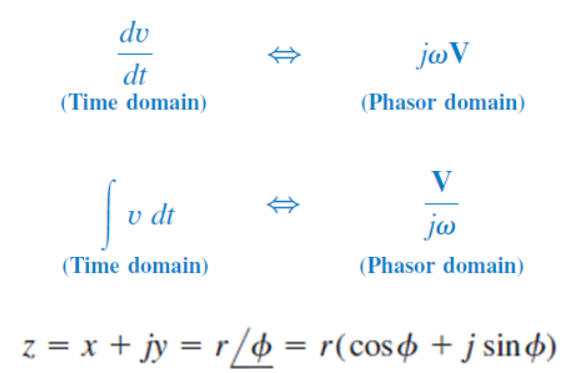
교류전원의 전압 역시 페이저로 표현되기도 한다. 페이저로 표현된 전압식을 임피던스로 나누어주면 전류를 쉽게 구할 수 있다. 페이저는 주로 정현파를 사용하는 교류에서 많이 사용되는데, 그 이유는 시간 도메인에서는 무한히 길게 표현해야 하는 교류를 복소수 평면위에 그린 페이저를 이용하면 각주파수를 이용한 전기각으로 표현하여 한 눈에 파악할 수 있기 때문이다. 위상각은 φ 로 표현되고, 0~2π로 표현하는데, 음의 주파수 영역을 고려하면, -π ~ π로 표현하기도 한다. 라플라스 변환을 사용하면 아래와 적분, 미분을 단순 대수 방정식의 항으로 변환할 수 있다.
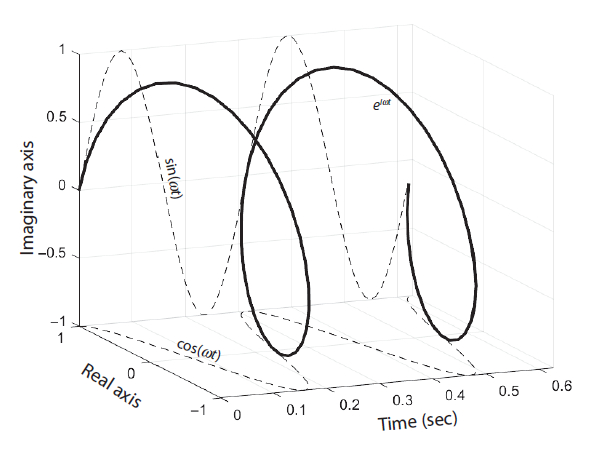
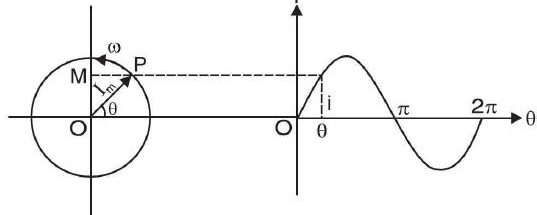
예를 들어서, $sin(wt + \theta)$를 페이저로 표현하면 다음과 같다. 출발점이 $\theta$만큼 밀렸고, 각속도(각주파수) w에서 시간 t만큼 경과하는 경우 벡터가 가르키는 방향은 바뀔 것이다. 시간 t에 대한 최종 전기각은 $wt + \theta$가 된다.
임피던스의 계산
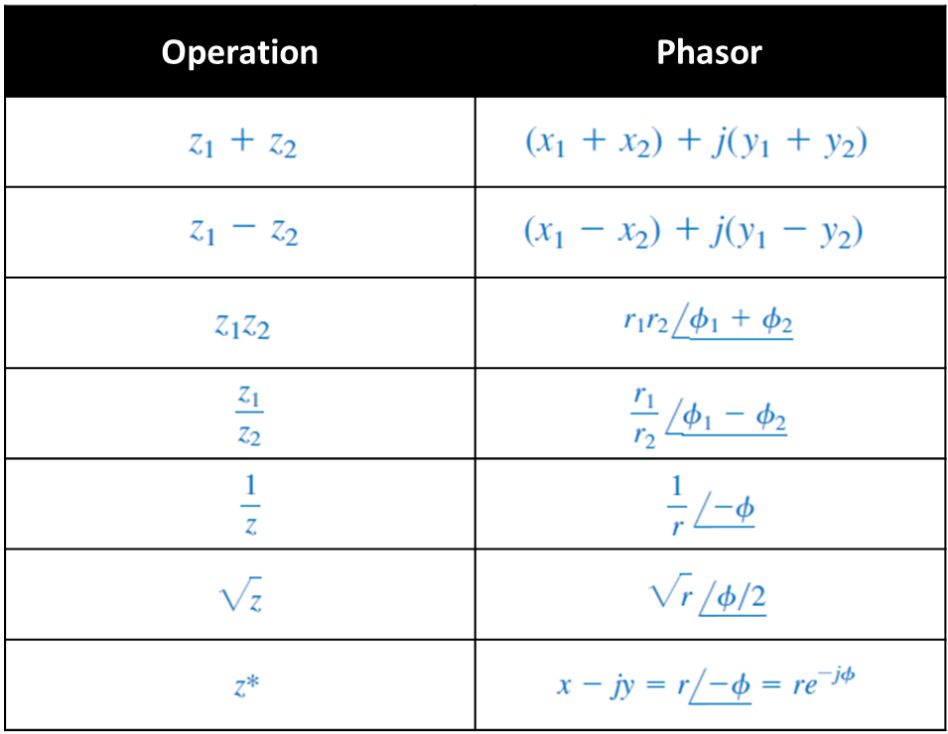
두 임피던스의 연산은 아래와 같이 계산할 수 있다. 덧셈/뺄셈은 복소수의 형태로 하는 편이 간편하고, 곱셈/나눗셈/역수/켤레(공액)임피던스 연산은 페이저를 이용하는 편이 간단하다.
리액턴스와 복소수 좌표계
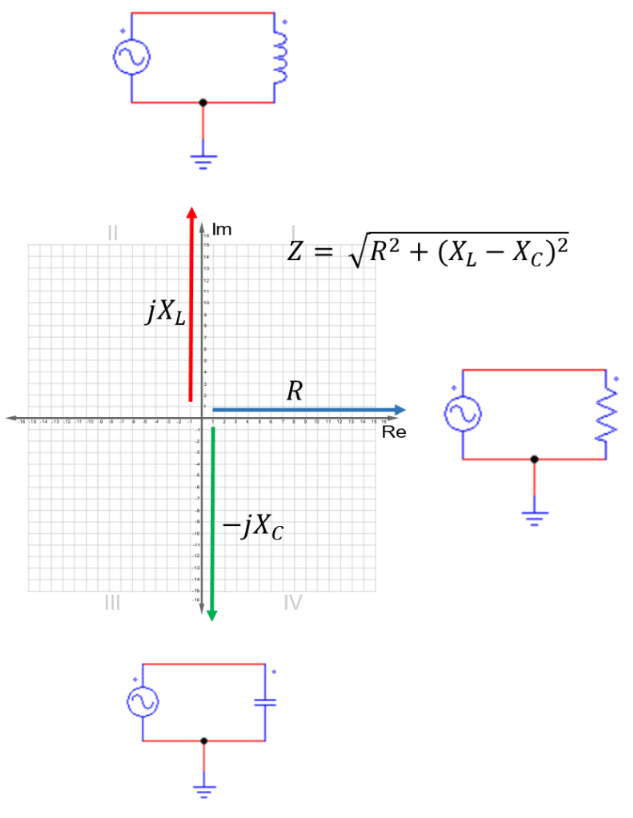
일반적으로 임피던스는 복소수 좌표계 위에 표현된다. 임피던스가 Z = $ R + jX $ 로 표현된다는 점을 생각해보면 이해가 된다. 여기서 X 는 총 리액턴스로 유도성 리액턴스와 용량성 리액턴스를 합한 값이다. 위 그림에서 확인할 수 있듯, 용량성 리액턴스는 90도 뒤지고 용량성 리액턴스는 90도 앞선다는 것을 알 수 있다.
임피던스의 크기(원점으로부터의 거리)는 $\left\lvert Z \right\rvert $, 위상(실수축과의 각도)은 $\phi $(phi)로 쓰인다. 전기회로에서 위상이란, 전류대비해서 전압의 파형의 차이를 각도로 표현한 값을 의미한다.
$$ \left\lvert Z \right\rvert = \sqrt{R^{2} + X^{2}} $$
$$ \phi = \tan^{-1}{\frac{X}{R}} $$
임피던스의 크기와 위상
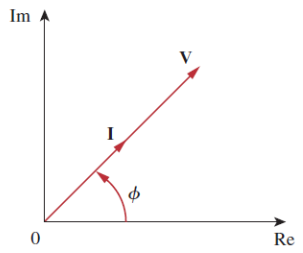
저항 V-I 관계
저항은 아래와 같이 전압과 전류가 동일한 위상을 가진다.
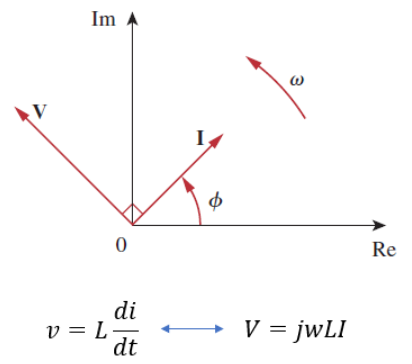
인덕터 V-I 관계 (지상)
인덕터는 전류가 전압보다 위상이 $pi \over 2$ 만큼 뒤진다. 즉, 전류가 전압보다 뒤지므로 지상이다.
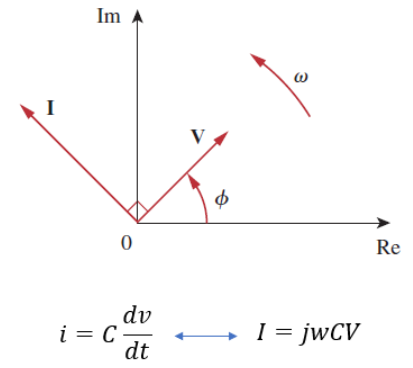
커패시터 V-I 관계 (진상)
커패시터는 전압이 전류보다 위상이 $pi \over 2$ 만큼 뒤진다. 즉, 전류가 전압보다 앞서므로 진상이다.
예제 1
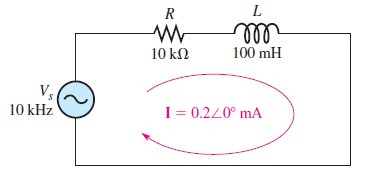
위와 같은 회로가 있을 때, 입력전압과 회로에 흐르는 전류와의 관계를 구하라.
$$ X_{L} = 2{\pi}fL = 2{\pi}(10kHz)(100mH) = 6.28k\Omega \tag{1} $$
$$ \textbf{Z} = R + jX_{L} = 10k\Omega + j6.28k\Omega \tag{2} $$
$$ \textbf{Z} = \sqrt{R^{2} + X_{L}^{2}}\tan^{-1}{\frac{X_{L}}{R}} $$
$$ = \sqrt{(10k\Omega)^{2} + (6.28k\Omega)^{2}}\tan^{-1}{\frac{6.28k\Omega}{10k\Omega}} = 11.8\angle{32.1}^{\circ}k\Omega \tag{3} $$
$$ \textbf{V}_{s} = \textbf{IZ} = (0.2\angle{0}^{\circ}mA)(11.8\angle{32.1}^{\circ}k\Omega) = 2.36\angle{32.1}^{\circ} V $$
결과적으로 전압은 전류의 2.36배이고 위상은 32.1˚ 앞선다.