폐루프 시스템
작성일 : 2023년 01월 20일 (Friday)
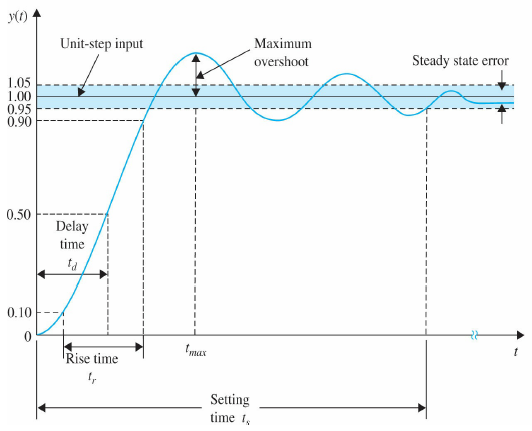
제어를 설계할 때에는 무엇을 기준으로 해야하고, 제어의 성능이 좋다는 말은 어떤 뜻일까?
제어로직을 설계할 때는 가장 먼저 입력이 무엇이고, 제어의 목표가 무엇인지를 확실히 해야 한다. 제어기의 역할을 확실하게 해놓지 않고, 설계 도중에 임기응변으로 변경하게 되면 항상 잘못된 부분이 발생한다. 아래의 예시를 봐보면 좋다.
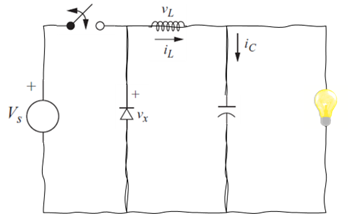
위는 아주 간단한 벅 컨버터다. 벅 컨버터는 스위칭을 이용해서 전압을 강하시키는 회로인데, 제어를 통해 커패시터에 원하는 전압을 생성해서 전구의 정격전력을 공급하는 회로이다. 아래와 같은 상태에서 제어를 한다고 가정해보자.
화이트박스 시스템
입력 : 1000V (전압강하가 없는 이상적인 전압원)
전구 : 정격전압 200V, 정격전력 10W
인덕턴스 : 400$\mu$H
커패시턴스 : 100$\mu$F
전구의 정격전원은 10W라고 가정하고, 정격전압은 220V로 가정한다. 전구는 수동소자이기 때문에 전류량은 전압에 비례한다. 사실, 위 회로는 우리가 인덕턴스, 커패시턴스, 전구의 정격전력을 모두 알기 때문에 폐루프 제어를 할 필요까지는 없다. 10W이면 단순히, 아래의 벅 컨버터 공식에 따라서 원하는 전압을 달성하기 위해서 듀티를 조정하면 된다. 벅컨버터의 전압이득은 D (시비율) 이기 때문에 단순히 1000V에서 200V를 달성하기 위해서는 스위치의 듀티를 20%로 설정하면 된다. 그리고 출력전압이 목표했던 전압의 200V에서 $\pm$5V 수준으로 유지하기 위해서는 아래 식을 참조해서 스위칭 주파수를 정하면 된다.

블랙박스 시스템 p
여기서 조금만 조건에 변화를 줘도 폐루프 제어가 필요하다는 것을 알 수 있다. 만약, 입력이 이상적인 전압원이 아니라 배터리이고 전구 뿐만 아니라 다른 부하들이 줄줄이 연결되어 있고 그 부하들을 임의로 누군가 킬 수도 있고 끌 수도 있는 형태라고 가정해보겠다. 그러면 배터리의 특성상 쓰면 쓸수록 SOC(State of Charge)가 내려가고 수명이 오래된 배터리이면 SOH(State of Health)에 따라서 입력전압이 변동될 수 있고, 연결된 부하가 많아지면 전체 임피던스가 감소해서 전류량이 늘어나게 될 수도 있다. 그렇게 되면 커패시턴스의 전압이 빠르게 감소하기 때문에 단순히 개루프 제어를 해서는 부하효과를 상쇄시킬 수 없다. 블록 다이어그램으로 그려보면 아래와 같다.
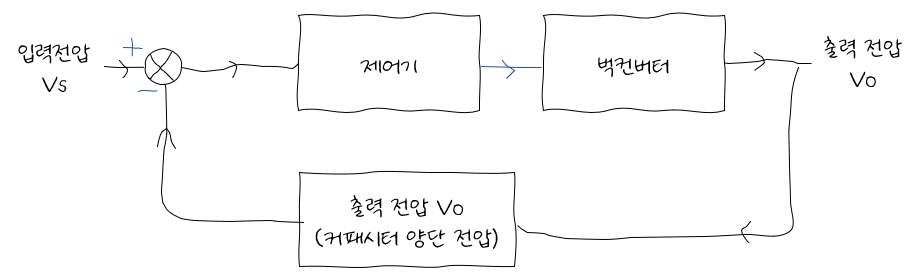
제어기는 화이트박스 시스템과 동일한 식으로 제어하되, 피드백받은 전압이 조금 떨어지면 그 것을 보상해주는 방향으로 설계하면 된다. 제어기는 PID 제어를 기본으로 한다. PID를 설계하려면 먼저 라플라스 변환 등 적분변환에 대한 이해와 함께 s도메인에서 표현된 전달함수를 분석할 수 있어야 한다. 다음장에서는 그 내용을 다루고, 그 다음 장에서 위 그림에 대해서 제어기를 설계하는 방법을 다루려고 한다.
▶ 포스트