시스템과 전달함수
작성일 : 2023년 01월 17일 (Tuesday)
과거 학부생 때, 제어공학에서 제어라는 단어의 의미도 어렵게 느껴졌던 기억이 있다. 시스템, 제어 등 흔히 사용했던 단어이지만, 막상 교과목으로 지정되어 공부하려고 하니 막연하다는 느낌이 들었다.
시스템이란 무엇일까?
시스템은 특정 기능을 구현하기 위해서 필요한 요소들, 그리고 그 요소들을 활용해서 그 기능을 달성해내는 과정을 모두 포함하는 의미이다. 제어라는 것은 시스템에서 시스템의 요소들을 이용해서 시스템의 궁극적인 기능을 더 빠르고 안정적으로 달성해내는 것을 의미한다. 즉, 시스템을 설계하기 위해서는 제어가 꼭 필요하고 제어를 효과적으로 하기 위해서는 시스템을 분석할 수 있는 능력이 있어야 한다. 제어공학은 시스템의 분석 방법에 대한 학문이다.
보통, 시스템은 아래와 같이 구성된다. 안정적인 시스템을 잘 뜯어보면 결국 아래와 같은 구조로 구성되어 있다는 것을 알게된다.
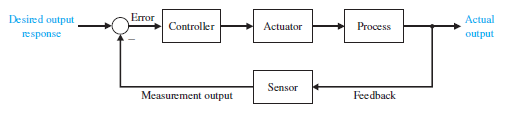
Controller가 실제로 기계적으로 운동하는 Actuator에 동작명령을 보내고 Actuator가 실제로 동작해 특정 작업이 이루어 진다. 아무리 정확하게 계산해서 Actuator에 명령을 전달했더라도 상황에 따라서 결과가 가변적일 수 있기 때문에 Sensor를 통해 현재 상태를 인지하고, 이 값을 다시 Controller로 보내서 에러값 (목표값 - 현재값)이 크다면, 다음번 Actuator가 동작할 때는 이를 보상해서 더 많이 동작하도록 하고 에러값이 작다면 다음 번 동작 때에는 덜 동작하도록하는 방식으로 시스템이 구성된다.
전달함수
수학적으로 접근해보자면, 모든 시스템은 함수를 통해 정의할 수 있다. 가장 익숙한 데이터인 시계열 데이터를 기반으로 전달함수를 정의하면 아래와 같이 정의될 것이다.
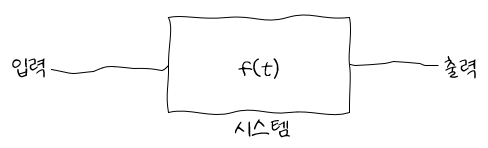
f(t)에 입력 t를 넣으면 출력이 구해지는 시스템이다. 입력변수가 t가 아니고 x라고 가정하고 예를 들면, 가속 페달이 밟힌 각도 만큼 동력이 가해지는 시스템을 연상해볼 수도 있을 것이다. 이러한 오픈루프 시스템은 제어라고 할만한 부분이 사실 없어서 분석에 어려움이 없다. 하지만, 피드백이 있는 폐루프 시스템의 경우는 어떨까?
폐루프 시스템
아래는 폐루프 시스템이다. 보통 전방함수 g로 액추에이팅 신호를 엑추에이터로 전달하고 그 출력을 다시 피드백 망을 통해서 피드백 이득을 곱해서 다시 입력에 되먹인다. 이후, 다시 입력에서 피드백 제어량을 뺀 값에 전방함수 g를 적용하고, 이러한 방식이 계속해서 반복되며 출력이 제어된다.
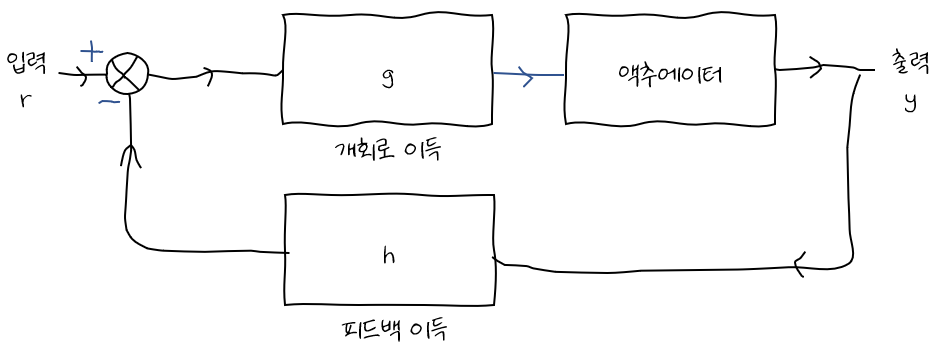
위 그림만 보더라도 개념적으로는 이해가 된다. 하지만, 실전으로 들어가면 애초에 g, h는 상수의 개념이 아니고 보통 매우 복잡한 수식이고, 그 수식을 구하는 과정은 정말 복잡하다.
다음장에서는 폐루프 시스템의 예시를 가지고, 폐루프 시스템을 설계할 때 요구되는 사양과 그 사양을 만족시키기 위한 과정을 소개한다.